Ⅰ.全体概要
現在、「H30幸手地区堤防整備等工事」(国土交通省関東地方整備局発注)では、平成30年度官民研究開発投資拡大プログラム(PRISM)の一環として、「対象技術Ⅱ:データを活用して品質管理の高度化等を図る技術」を、金杉建設株式会社を代表とし、株式会社アクティブ・ソリューションと弊社でコンソーシアムを組み、「3D締固め管理システムの開発」を試行しています。
1-1.試行の背景
「TS・GNSSを用いた盛土の締固め管理要領(平成31年3月)」に締固め層厚分布図によるまき出し厚の管理方法が規定されていることに加え、新たに試行されている「施工履歴データによる土工の出来高算出要領(案)(平成31年3月)」には、締固め管理システムを搭載した機械を用いた出来形算出について提案されています。従来の締固め管理システムでは、地盤計測データの信頼性ならびにデータ密度など不十分であり、データの信頼性および高精度化が必要とされています。
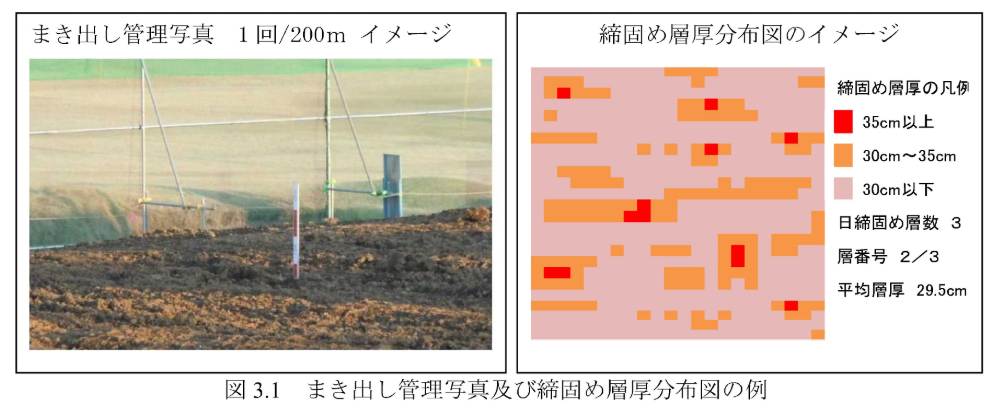
(参考)TS・GNSSを用いた盛土の締固め管理要領(平成31年3月)の「材料のまき出し厚確認方法」
本管理要領では、まき出し厚の標準的な確認頻度を従来の管理方法と同様に、200mに1回の頻度でまき出し厚管理の写真撮影を行う、又まき出し施工のトレーサビリティを確保するためTSあるいはGNSSによる締固め回数管理時の走行位置による面的な標高データを記録するものとする。
盛土の完成出来形に対して、施工層数ごとの締固め機械の標高データを記録しておくことで、各層ごとのまき出し終了後から締固め作業中及び締固め後の標高データを記録することとなり、施工状況のトレーサビリティ確保に寄与できる。
締固め回数管理時に取得した機械位置データを用い、全数・全層について各層の平均層圧を記載して締固め層厚分布図を作成し提出する場合は、200mに1回必須とされているまき出し厚管理時の写真撮影を省略することができる。なお、締固め層厚分布図を作成し提出する場合においても、1層目の締固め層厚については、従来どおり、丁張り、標尺等の近傍にて写真管理を行うこととする。
1-2.試行の概要
締固め機械(ブルドーザ)に搭載したレーザースキャナにより、リアルタイムに出来形計測可能な機能を有する締固め管理システムを開発します。このシステムにより、これまでの締固め機械の移動履歴による締固め回数管理機能に加えて、締固め直後の3D地盤データの自動取得により、高精度かつ高密度な施工履歴による出来形管理および施工層厚管理が期待できます。
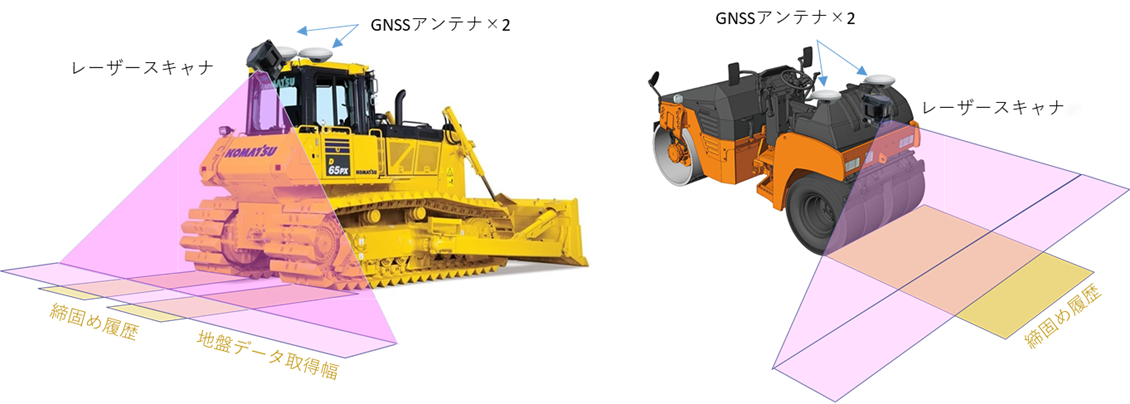
図1-2 使用機材と計測範囲の関係
Ⅱ.技術の概略
2-1.従来技術と試行技術の相違点
従来技術の締固め管理システムでは、GNSSの移動履歴とGNSSアンテナ位置のオフセット機能により、出来形データを取得しています。この機能では、締固め機械の傾斜補正や方向補正が十分になされておらず、取得できるデータもオフセット位置の移動による線データとなっています。
これに対し、本試行技術で開発するシステムでは、傾斜補正ツールとして3Dモーションセンサ(IMU)を、方向補正ツールとして方位出力可能なGNSS受信機を、地盤データ取得にレーザースキャナを使用します。その結果、高精度な傾斜補正と方向補正が可能となり、高精度・高密度な3D出来形データを取得することができます。
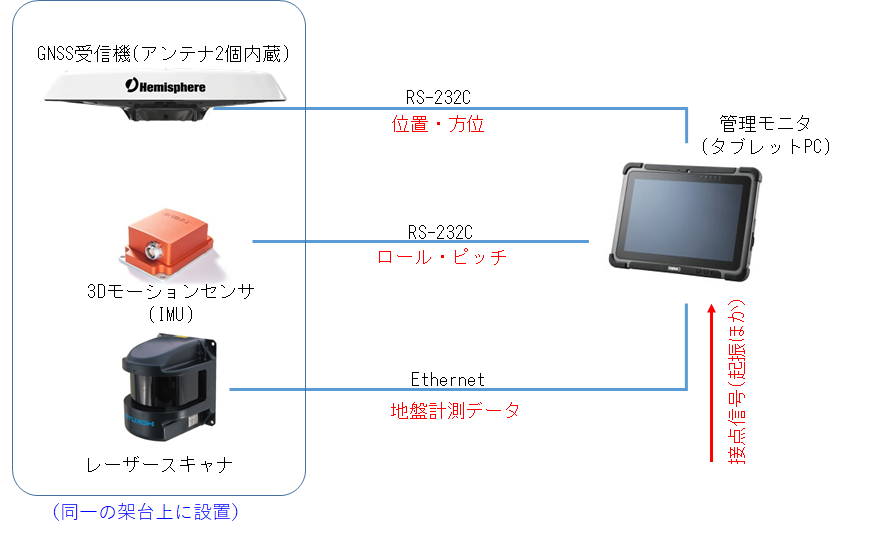
図2-1 使用機材と取得データ要素の関係
2-2.水平地盤における出来形計測誤差の比較
水平地盤における出来形計測では、図2-2に示すように、水平位置については従来技術と試行技術において大きな差は見られません。一方、鉛直位置については、従来技術では履帯や転輪の自沈量を考慮して補正する必要がありますが、試行技術では直接地盤を計測するため補正は必要ありません。
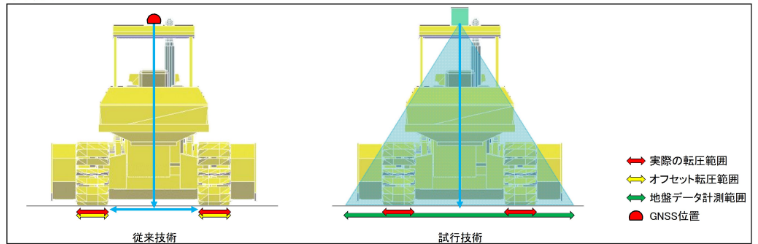
図2-2 水平地盤における出来形計測位置
2-3.傾斜地盤における出来形計測誤差の比較
傾斜地盤における出来形計測では、図2-3に示すように、従来技術については実際の転圧位置とオフセットされた転圧位置に差異が生じています。一方、試行技術では、地盤傾斜に則して計測位置を補正するため、実際の転圧位置を高精度に計測することが可能です。
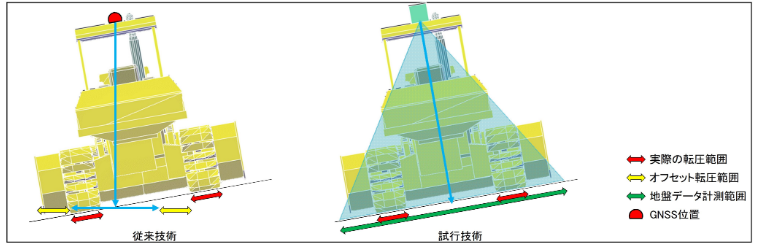
図2-3 傾斜地盤における出来形計測位置
2-4.出来形計測範囲の比較
出来形計測の範囲は、図2-4に示すように、従来技術については履帯や転輪の接地範囲のみの計測となります。一方、試行技術については履帯や転輪の接地範囲のみならず、ある程度側方まで計測することが可能です。
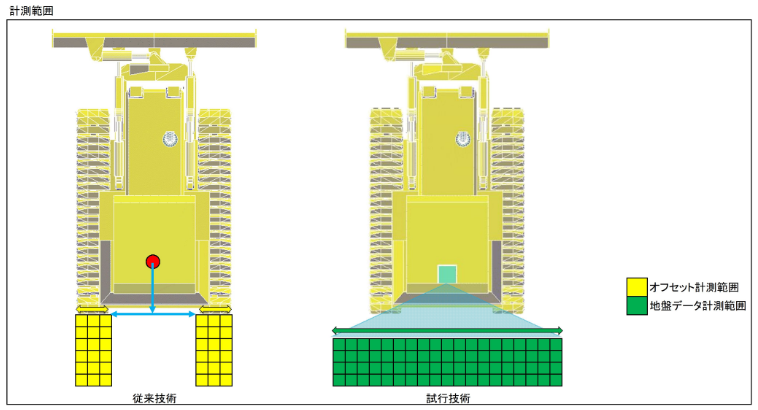
図2-4 出来形計測範囲
Ⅲ.検証方法
3-1.検証データの取得概要
「施工履歴データによる土工の出来高算出要領(案)(平成31年3月)」では、テスト走行による検測方法が記載されています。この検測方法を踏まえ、数種類のパターンで計測を行い、検証を行う予定です。
計測は、締固め機械を走行させながら搭載型レーザースキャナ(以下、搭載型LS)で計測した後、地上型レーザースキャナ(以下、地上型LS)を締固め機械進行方向に対し直角に設置して計測を行います。今回使用する地上型LS の測定精度は1~50mの範囲で誤差6mm 以内であることから、地上型LS で計測して得られた点群データを基準値とし、搭載型LSの計測値と比較し検証を行います。
GNSS測位誤差、姿勢計測誤差、建設機械の振動による誤差が計測誤差として生じる可能性が有ります。相対誤差が鉛直誤差±30mm 以内に収まっているか解析し、誤差が大きい場合は、搭載型LS の緩衝方法や計測方法などの見直しを行います。
(参考)施工履歴データによる土工の出来高算出要領(案)(平成31年3月)の「テスト走行による検測」
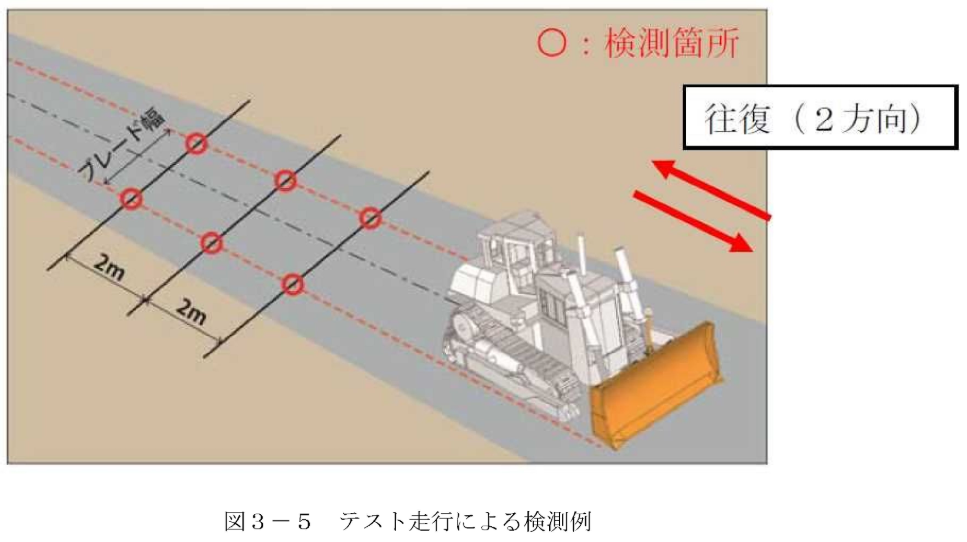
施工前に、ICTブルドーザによるテスト走行を行い、テスト面の検測から取得したデータを用いて位置精度を確認する。現況地形のデータをMC・MGシステムに搭載したブルドーザを走行し、作業装置の左右端の2点以上を検測する。さらに、テスト走行は、異なる2方向(例えば逆向き)で作業装置角度を変えて実施すること。検測箇所は、2方向の走行を含めて、延べ12箇所以上とする。
3-2.ブレード幅端部の検証
ブレード幅端部における計測精度を解析します。解析点は、図3-2に示すように、進行方向4.0mに対し、ブレード両端部において10cm 間隔で抽出します。
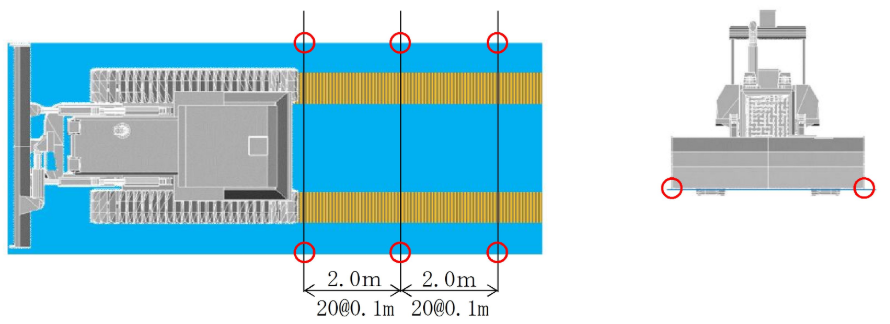
図3-2 ブレード幅端部の検証点位置図
3-3.平坦部の検証
平坦部における計測精度を解析します。解析点は、図3-3に示すように、進行方向4.0mに対し、平坦部において10cm 間隔で抽出します。
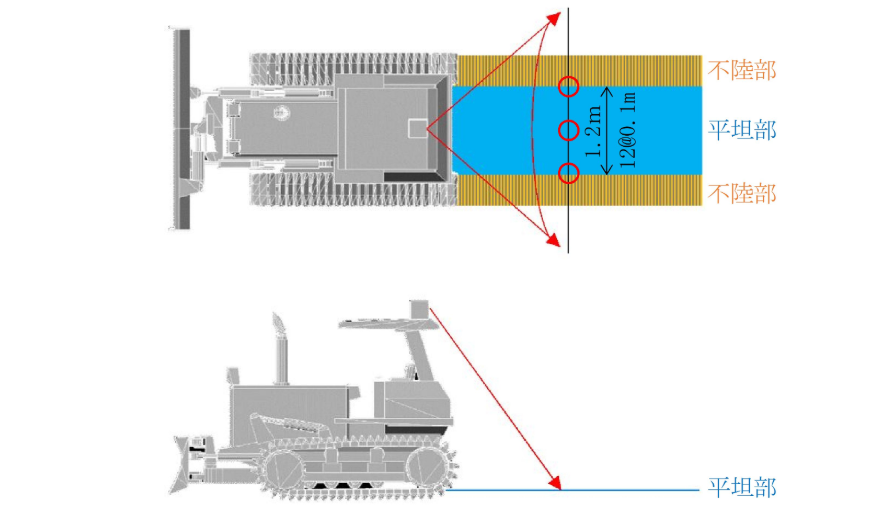
図3-3 平坦部の検証点位置図
3-4.不陸凸部の検証
不陸凸部における計測精度を解析します。解析点は、図3-4に示すように、進行方向4.0mに対し、不陸凸部において10cm 間隔で抽出します。
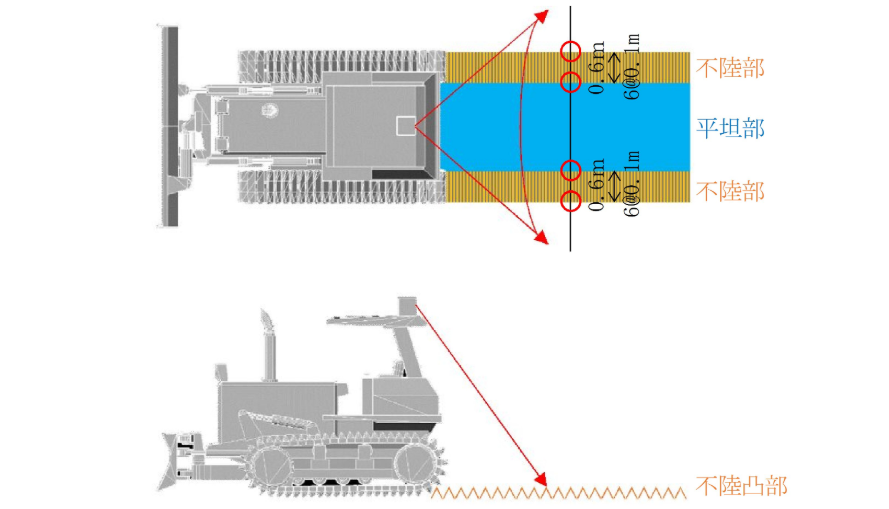
図3-4 不陸凸部の検証点位置図
3-5.不陸凹部の検証
不陸凹部における計測精度を解析します。解析点は、図3-5に示すように、進行方向4.0mに対し、不陸凹部において10cm 間隔で抽出します。
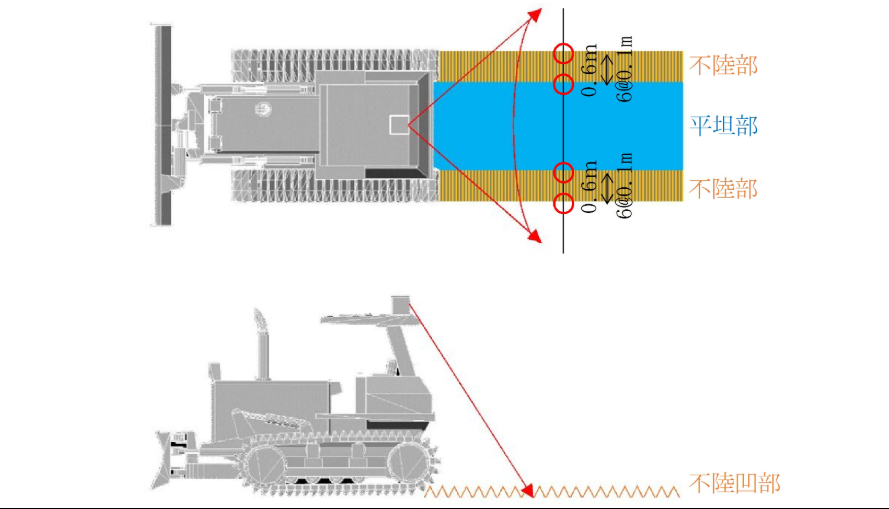
図3-5 不陸凹部の検証点位置図
3-6.実走行による検証
システムの相対誤差が収束していることを確認後、実走行による検証を行います。複数層に渡り計測を行い、締固め層厚分布図の作成や盛土量の比較を行う予定です。